انجمن را در گوگل محبوب کنيد :
|
|||||||


| تبليغات سايت | |||||||||||||||||||||||||||||||||||
  |
|
|
LinkBack | ابزارهاي تاپيک | نحوه نمايش |
 ۰۵-۳-۱۳۹۴, ۰۲:۴۰ قبل از ظهر
۰۵-۳-۱۳۹۴, ۰۲:۴۰ قبل از ظهر
|
#1 (لینک دائم) |
|
عضو جدید
 
تاريخ عضويت: مرداد ۱۳۹۴
پست ها: 2
تشكرها: 0
0 تشكر در 0 پست
|
سلام
در این مقاله می خوام در مورد سیستم نرم افزاری درون ربات مریخ نورد Mars Pathfinder ناسا مطالبی به صورت خلاصه برای علاقه مندان به رباتیک فضایی و برای کسانی که در مورد ربات ها در محیط های خشن تحقیق می کنند ارائه دهم. در ضمن مطالب بر گرفته از آزمایشگاه پیشرانش جت و انستیتو تکنولوژی کالیفرنیا است. بخش اول: معرفی ابتدایی ربات و اهداف آن مریخ نورد راه یاب (Pathfinder) برنامه پروازی به مریخ برای سال 1997 بود است. هدف ایجاد ماموریتی چالشی برای انجام فعالیت های علمی و مهندسی بر روی سطح مریخ در مدت ماموریت کوتاه است. همانطور که از توصیف کوتاه فوق مشخص است سیستم نرم افزاری این ربات به دو بخش علمی و مهندسی تقسیم می شود که هر بخش به طور جداگانه فعالیت های مشخصی را برای به انجام رسانیدن ماموریت های تعریف شده تعریف می کنند. طراحی این ربات در مدت زمانبندی کوتاه و با بودجه بسیار اندک برنامه ریزی شده است. از این رو مهندسان تیم طراحی ربات باید ملاحظات زمانبندی و بودجه را در نظر می گرفتند. اهداف این ربات را می توان به چند بخش تقسیم کرد: 1. قرار گیری یک محموله علمی ساده، قابل اطمینان، و کم هزینه بر روی سطح مریخ 2. الزام ناسا برای اکتشافات سیاره ای با هزینه کم 3. قرار دادن یک سطح نورد کوچک با قابلیت تحرک پذیری 4. آماده سازی برای فرود محموله های بزرگ تر 5. حرکت بر روی سطح در محدوده تعیین شده 6. بررسی ارتباط ربات با زمین و ارسال داده ها و دریافت فرامین با توجه تاخیر لینک 7. انجام فعالیت های علمی مانند بررسی جو مریخ در طول ورود به جو، تعیین عناصر ترکیبی سنگ و خاک، تحقیقات زمین شناسی و کانی شناسی سنگ ها و کسب داده های هواشناسی در سطح خود فضاپیما ماموریت از سه بخش تشکیل شده است: بخش کروز، خودروی ورود و فرودگر. بخش کروز خودرو ورود و فرودگر را به مریخ حمل می کند و قبل از ورود به مریخ جدا می شود. خودروی ورود شامل سپر حرارتی، چتر ترمزی و راکت های کاهش دهنده سرعت است و از فرودگر را در طول ورود مستقیم به مریخ هدایت می کند و در طی ورود عملیاتی در فواصل از قبل تعیین شده برای کاهش سرعت انجام می دهد که این کارها باید به ترتیب صورت گیرند. در درون خودروی فرودگر یک میکرو ربات قرار دارد که بعد از فرود بر روی سطح مریخ طی فرآیندی باز می شود و میکرو ربات را از حالت پیکربندی قفل به پیکربندی تحرک پذیری تبدیل می کند. خود فرودگر پس از آن دکل هواشناسی و دوربین خود را مستقر می کند. ادامه مطالب بعد گفته خواهد شد. متشکرم |

|

|

| #ADS | |
|
نشان دهنده تبلیغات
تبليغگر
تاريخ عضويت: -
محل سكونت: -
سن: 2010
پست ها: -
|
|

|
|
۰۵-۳-۱۳۹۴, ۱۲:۴۶ بعد از ظهر
|
#2 (لینک دائم) |
|
عضو جدید
تاريخ عضويت: مرداد ۱۳۹۴
پست ها: 2
تشكرها: 0
0 تشكر در 0 پست
|
بخش های فضاپیما که در پست قبلی به آن اشاره شد در طول فاز توسعه به صورت جداگانه طراحی و ساخته می شوند و در نهایت پس از تست های انجام شده توسط هریک از آنها به صورت یکپارچه به هم متصل می شوند و به عنوان یک واحد که "فضاپیما" نامیده می شود در یک حالت پیکربندی قبل از پرتاب قرار می گیرند. و سپس برای پرتاب توسط خودروی پرتابی آماده سازی می شود.
اما در ادامه به بحث درباره خود کل فضاپیما نمی پردازم ولی اگر خواستید می توانید پیشنهاد دهید که به آن پرداخته شود. اما خود سیستم پرواز که برای آن نرم افزار نوشته شده است شامل زیر سیستم های زیر می باشد که کل سیستم فضاپیما را شامل می شود: 1. سیستم مدیریت اطلاعات و نگرش 2. سیستم سوییچینگ برق و Pyro 3. سیستم ارتباطات از راه دور 4. سخت افزار یکپارچه سازی مکانیکی 5. سیستم کنترل ورود، نزول، و فرود 6. سیستم پیشرانش میکرو رباتی که در درون خودرو فرودگر (سطح نشین) قرار دارد به نام سوجونر شناخته می شود. این میکرو ربات شامل مشخصات زیر است: -- مشخصات عملیاتی * یک فضاپیمای ساده * یک ماشین سریال: اجرای فرامین پشت سر هم * عملیات در محیط غیر قطعی: چون که محیط ناشناخته است عامل حالت بعدی محیط را به طور قطعی از روی حالت فعلی و عملی که در حال انجام است نمی تواند تعیین کند به همین چنین محیط برای ربات پویاست. در این صورت هر عمل در آن محیط ممکن است نتایج غیر منتظره ای در پی داشته باشد. * سیستم مبتنی بر متدلوژی رویداد گرا طراحی شده است: به این صورت که سیستم به صورت یک ماشین حالت عمل می کند و هر اقدام یا عمل روی دادن یک رویداد است که منجر به رفتن به حالت دیگری می شود. به همین علت یک رویداد در سیستم یک تغییر حالت است که به اقدامی پاسخ می دهد. و سیستم براساس پاس دادن پیام هایی در قالب پارامتر عمل میکند. و شامل موارد زیر است: ** عدم قطعیت برای بسیاری از دستورات. به عنوان مثال پیمایش ربات به یک نقطه مسیر در زمان اجرا به طور قابل توجهی دارای عدم قطعیت است. ** با وجود فضای حالت در این سیستم، هر دستور بعد اجرای کامل دستور قبلی شروع می شود. ** ربات به طور متوالی می تواند با فعالیت های فرودگر با درج کردن دستور خاصی در زمان مناسبی در طول این دنباله متوالی همگام سازی مجدد شود. گاهی اجرای فعالیت هایی مانند ارسال داده ها به و از فرودگر به ربات نیازمند همگام سازی مجدد است. -- مشخصات فیزیکی * حجم ربات: حدود 11 کیلوگرم * LMRE (تجهیزات نصب شده در ربات): حدود 5 کیلوگرم * ابعاد ربات (در حالت استقرار یافته): 63 سانتی متر طول در 43 سانتی متر عرض در 2.8 سانتی متر ارتفاع -- مشخصات سیستم تحرک پذیری * عناصر سخت افزاری ربات به شکل زیر است: 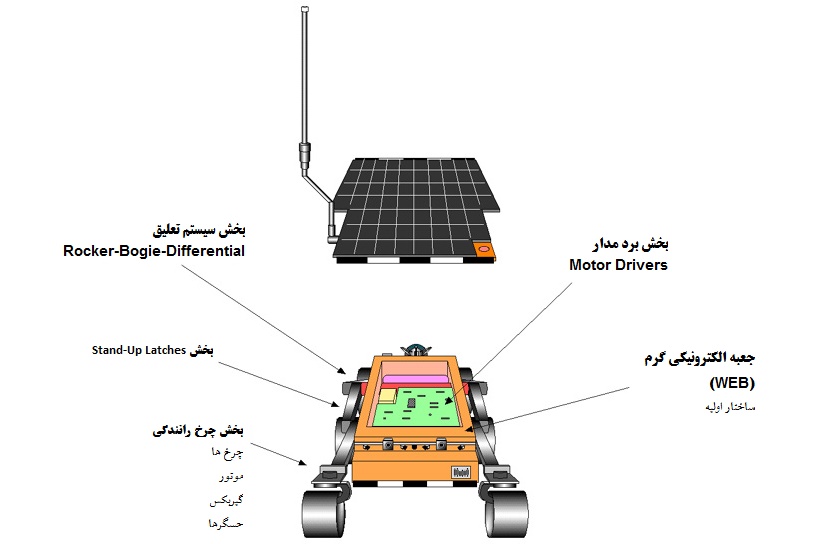 * طراح شاسی Rocker-bogie * 6 چرخ برای رانندگی، 4 چرخ برای فرمان(هدایت) * سرعت ربات حدود 0.4 متر در دقیقه * ربات می تواند از موانع با مشخصات تعیین شده عبور کند. * ربات می تواند در مکان خود به اطراف چرخش کند. * ربات در طول فاز کروز در حالت جمع شده قرار می گیرد تا حجم را کاهش دهد. * بعد از در آمدن از حالت جمع شده، چرخ های عقبی رانندگی رو به جلو قرار می گیرند سپس ربات از حالت جمع شده با سمت بالا کشیده می شود و بازوی Rocker قفل شده و به حالت پیکربندی استقرار قرار می گیرد. ادامه مطالب بعد گفته خواهد شد. متشکرم |
|
|
|
|
«
تحليل سينماتيكي و ديناميكي ربات دوپا با 10 درجه آزادي
|
«زنبور سیاه»، حشرهای در خدمت ارتش آمریکا
»
| كاربران در حال ديدن تاپيک: 1 (0 عضو و 1 مهمان) | |
 Linear Mode
Linear Mode

|
|

زمان محلي شما با تنظيم GMT +3.5 هم اکنون ۱۱:۲۸ قبل از ظهر ميباشد.





