انجمن را در گوگل محبوب کنيد :
|
|||||||


| تبليغات سايت | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
  |
|
|
LinkBack | ابزارهاي تاپيک | نحوه نمايش |
 ۰۷-۲۱-۱۳۸۸, ۰۹:۳۴ قبل از ظهر
۰۷-۲۱-۱۳۸۸, ۰۹:۳۴ قبل از ظهر
|
#1 (لینک دائم) |
|
Administrator
 
تاريخ عضويت: خرداد ۱۳۸۷
محل سكونت: تهران-کرج!
پست ها: 3,465
تشكرها: 754
16,339 تشكر در 3,127 پست
My Mood:

 |
در اين قسمت قصد داريم مقالات مختلفي از مباحث ربات ها را قرار دهيم

|

|

|


| از Astaraki تشكر كرده اند: |
| #ADS | |
|
نشان دهنده تبلیغات
تبليغگر
تاريخ عضويت: -
محل سكونت: -
سن: 2010
پست ها: -
|
|

|
|
۰۷-۲۱-۱۳۸۸, ۰۹:۳۶ قبل از ظهر
|
#2 (لینک دائم) |
|
Administrator
تاريخ عضويت: خرداد ۱۳۸۷
محل سكونت: تهران-کرج!
پست ها: 3,465
تشكرها: 754
16,339 تشكر در 3,127 پست
My Mood:
|
ارائه روشي جديد براي مكان يابي و تهيه نقشه بطور همزمان براي دو ربات متحرک
")
|
|
|
|
| از Astaraki تشكر كرده اند: | 30na (۱۲-۱۴-۱۳۸۹), apz (۰۲-۲۰-۱۳۹۲), ashkan yasin (۱۱-۸-۱۳۹۲), milad_sabz (۰۳-۲-۱۳۹۳), robomehdi (۰۴-۱۴-۱۳۹۰), soodeh1010 (۰۲-۱۱-۱۳۹۰), شورانگیز (۰۷-۱۷-۱۳۸۹) |


|
۰۷-۲۱-۱۳۸۸, ۱۰:۰۲ قبل از ظهر
|
#5 (لینک دائم) | |
|
Administrator
تاريخ عضويت: خرداد ۱۳۸۷
محل سكونت: تهران-کرج!
پست ها: 3,465
تشكرها: 754
16,339 تشكر در 3,127 پست
My Mood:
|
نقل قول:
 ولي فعلاً بنده اين کد C که با codevision نوشته شده رو قرار ميدم اميدوارم مفيد باشه!كد:
#include <mega16.h>
#include <delay.h>
// Alphanumeric LCD Module functions
#asm
.equ __lcd_port=0x15 ;PORTC
#endasm
#include <lcd.h>
// Declare your global variables here
bit bk,j;
void motor(float p1,float p2)
{
if(p1>=0)OCR1AL=(int)p1;else OCR1AL=-(int)p1;
if(p2>=0)OCR1BL=(int)p2;else OCR1BL=-(int)p2;
if(p1>0)
{
PORTD.0=1;
PORTD.1=0;
}else
{
PORTD.0=0;
PORTD.1=1;
}
if(p2>0)
{
PORTD.2=1;
PORTD.3=0;
}else
{
PORTD.2=0;
PORTD.3=1;
}
}
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=P State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTA=0xFF;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=P State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTB=0xFF;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
PORTD=0x00;
DDRD=0xFF;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=FFh
// OC0 output: Disconnected
TCCR0=0x00;
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: 31.250 kHz
// Mode: Fast PWM top=00FFh
// OC1A output: Non-Inv.
// OC1B output: Non-Inv.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0xA1;
TCCR1B=0x0C;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// LCD module initialization
lcd_init(16);
while (1)
{
if(PINA.6==1) j=1.275; else j=1;
lcd_gotoxy(0,0);
lcd_putchar(PINB.4+'0');
lcd_putchar(PINB.3+'0');
lcd_putchar(PINB.2+'0');
lcd_putchar(PINB.1+'0');
lcd_putchar(PINB.0+'0');
lcd_putchar(PINA.5+'0');
lcd_putchar(PINA.4+'0');
lcd_putchar(PINA.3+'0');
lcd_putchar(PINA.2+'0');
lcd_putchar(PINA.1+'0');
lcd_putchar(PINA.0+'0');
lcd_gotoxy(11,0);
if(bk)lcd_putsf("Black");else lcd_putsf("White");
if((PINA.5==1&&PINA.4+PINA.3+PINA.2+PINA.1+PINA.0>=4&&PINB.4+PINB.3+PINB.2+PINB.1+PINB.0==0&&!bk)||
(PINA.5==0&&PINA.4+PINA.3+PINA.2+PINA.1+PINA.0<=1&&PINB.4+PINB.3+PINB.2+PINB.1+PINB.0==5&&bk))
{
motor(200*j,-200*j);
lcd_gotoxy(0,1);
lcd_putsf("Left 60 ");
delay_ms(300);
continue;
}
if((PINA.5==1&&PINA.4+PINA.3+PINA.2+PINA.1+PINA.0==0&&PINB.4+PINB.3+PINB.2+PINB.1+PINB.0>=4&&!bk)||
(PINA.5==0&&PINA.4+PINA.3+PINA.2+PINA.1+PINA.0==5&&PINB.4+PINB.3+PINB.2+PINB.1+PINB.0<=1&&bk))
{
motor(-200*j,200*j);
lcd_gotoxy(0,1);
lcd_putsf("Right 60 ");
delay_ms(300);
continue;
}
if((PINA.5==1&&!bk)||(PINA.5==0&&bk))//MOSTAGHIM
{
motor(200*j,200*j);
lcd_gotoxy(0,1);
lcd_putsf("Straight");
delay_ms(10);
continue;
}
if(PINA.4+PINA.3+PINA.2+PINA.1+PINA.0>=2&&PINB.4+PINB.3+PINB.2+PINB.1+PINB.0>=2)bk=1;else bk=0;
if((PINB.4==1&&!bk)||(PINB.4==0&&bk))
{
motor(200*j,-200*j);
lcd_gotoxy(0,1);
lcd_putsf("Left 5 ");
}
if((PINB.3==1&&!bk)||(PINB.3==0&&bk))
{
motor(200*j,-80*j);
lcd_gotoxy(0,1);
lcd_putsf("Left 4 ");
}
if((PINB.2==1&&!bk)||(PINB.2==0&&bk))
{
motor(200*j,-30*j);
lcd_gotoxy(0,1);
lcd_putsf("Left 3 ");
}
if((PINB.1==1&&!bk)||(PINB.1==0&&bk))
{
motor(200*j,0*j);
lcd_gotoxy(0,1);
lcd_putsf("Left 2 ");
}
if((PINB.0==1&&!bk)||(PINB.0==0&&bk))
{
motor(200*j,30*j);
lcd_gotoxy(0,1);
lcd_putsf("Left 1 ");
}
if((PINA.0==1&&!bk)||(PINB.0==0&&bk))
{
motor(200*j,-200*j);
lcd_gotoxy(0,1);
lcd_putsf("Right 5 ");
}
if((PINA.1==1&&!bk)||(PINB.1==0&&bk))
{
motor(200*j,-80*j);
lcd_gotoxy(0,1);
lcd_putsf("Right 4 ");
}
if((PINA.2==1&&!bk)||(PINB.2==0&&bk))
{
motor(200*j,-30*j);
lcd_gotoxy(0,1);
lcd_putsf("Right 3 ");
}
if((PINB.3==1&&!bk)||(PINB.3==0&&bk))
{
motor(200*j,0*j);
lcd_gotoxy(0,1);
lcd_putsf("Right 2 ");
}
if((PINB.4==1&&!bk)||(PINB.4==0&&bk))
{
motor(200*j,30*j);
lcd_gotoxy(0,1);
lcd_putsf("Right 1 ");
}
};
}
|
|
|
|
|

| از Astaraki تشكر كرده اند: | 30na (۱۲-۱۴-۱۳۸۹), ashkan yasin (۱۱-۸-۱۳۹۲), mboy (۰۳-۷-۱۳۹۱), robomehdi (۰۴-۱۴-۱۳۹۰), شورانگیز (۰۷-۱۷-۱۳۸۹) |
|
۰۷-۲۱-۱۳۸۸, ۱۰:۴۰ قبل از ظهر
|
#6 (لینک دائم) |
|
Administrator
تاريخ عضويت: خرداد ۱۳۸۷
محل سكونت: تهران-کرج!
پست ها: 3,465
تشكرها: 754
16,339 تشكر در 3,127 پست
My Mood:
|
در مورد اطلاعاتي هم از مسيرياب که خواستيد ،
اين شکل نمونه مدارش هست: 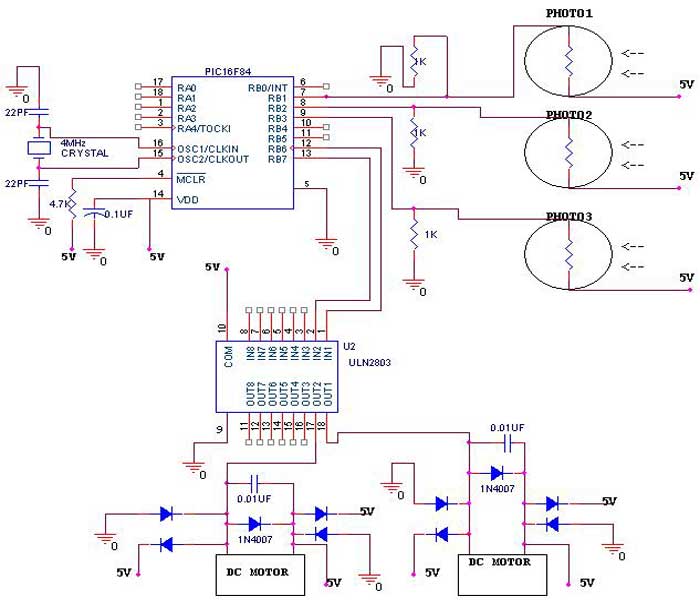 فایل اول زیر به آموزش ساخت ربات مسیر یاب یا تعقیب خط بدون استفاده از میکروکنترلر پرداخته که به نوبه خود جالبه فايل دوم یه کتاب آموزش ساخت ربات مسیریاب با نقشه و برنامه فايل سوم یه سورس ربات مسیریاب با میکرو هستش که شامل برنامه بیسکام و فایل پروتوس و... |
|
|
|
| از Astaraki تشكر كرده اند: |
|
۰۷-۲۱-۱۳۸۸, ۱۱:۱۰ قبل از ظهر
|
#7 (لینک دائم) |
|
Administrator
تاريخ عضويت: خرداد ۱۳۸۷
محل سكونت: تهران-کرج!
پست ها: 3,465
تشكرها: 754
16,339 تشكر در 3,127 پست
My Mood:
|
مقايسه روشهاي ساخت نگاشت شبكه اي در روباتهاي متحرك و روشهاي كاهش عدم قطعيت در داده هاي سونار با استفاده نظريه تركيب اطلاعات سنسوري
دانلود مقاله: |
|
|
|

|
| Tags |
| ربات |
| كاربران در حال ديدن تاپيک: 1 (0 عضو و 1 مهمان) | |
 Linear Mode
Linear Mode

|
|

زمان محلي شما با تنظيم GMT +3.5 هم اکنون ۱۰:۴۷ قبل از ظهر ميباشد.





